Connectedness
\[\newcommand{\ds}{\displaystyle} \newcommand{\curlies}[1]{\left\lbrace #1 \right\rbrace} \newcommand{\T}{\mathcal T} \newcommand{\Ext}{\text{Ext}} \newcommand{\B}{\mathcal B} \newcommand{\Sp}{\mathbb S}\]Connectedness
Let $X$ be a topological space. We say $X$ is disconnected if there exist two nonempty disjoint open sets $U, V \subseteq X$ so that $X = U \cup V$.
If $X$ is not disconnected, then it is connected.
Clopen subsets
$X$ is connected if and only if the only nonempty subset of $X$ that is both open and closed is $X$ itself.
Proof.
($\Rightarrow$) Suppose $X$ is connected. $X$ is a topological space so it is both open and closed.
($\Leftarrow$) Suppose $X$ is disconnected, then there are nonempty open disjoint subsets $U, V$ so that $U \cup V = X$.
Since $U^C = V$, $V^C = U$, and $U, V$ are open, $U, V$ are also closed.
Images of connected spaces are connected
Let $X$ be a connected space and $f : X \to Y$ be a continuous map. Then $f(X) \subseteq Y$ is connected.
For example, if $Y = \R$ and $p, q \in X$ with $f(p) = a$ and $f(q) = b$. Then $f$ takes on all values $c \in (a, b)$ (this is the Intermediate Value Theorem).
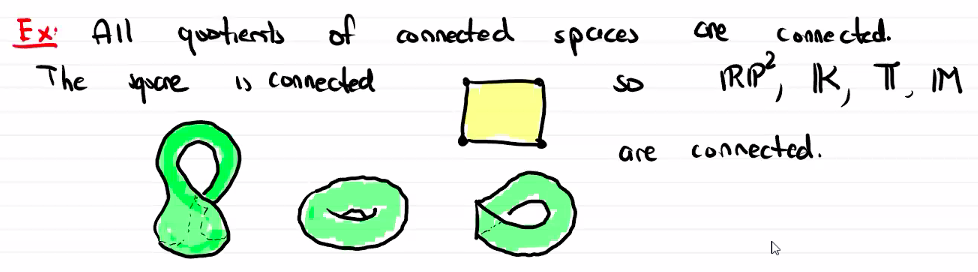
As another example, every quotient of a connected space is connected.
Properties of connected spaces
- Suppose $X$ is a topological space and $U, V$ are disjoint open subsets of $X$. If $A$ is a connected subspace of $X$ contained in $U \cup V$ then $A \subseteq U$ or $A \subseteq V$.
- If $X$ contains a dense connected subspace then $X$ is connected.
- Suppose $X$ is a topological space and $A \subseteq X$ is connected. Then $\overline A$ is connected, and so is any subspace $B$ with $A \subseteq B \subseteq \overline A$.
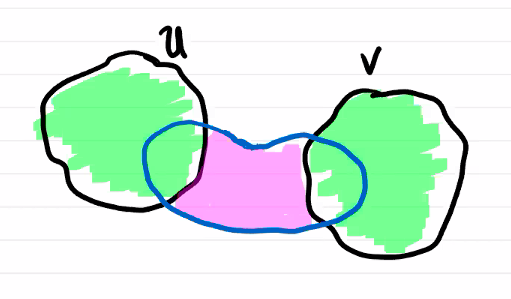
- Let $X$ be a topological space and $\curlies{B_\alpha}{\alpha \in A}$ a collection of connected subspaces of $X$ with a point in common. Then $\ds \bigcup{\alpha \in A} B_\alpha$ is connected.
Proof.
(1)
$A \cap U$ and $A \cap V$ are open in $A$.
$A = (A \cap U) \cup (A \cap U^C)$. Since $U$ and $V$ are disjoint and $A \subseteq U \cup V$, $A \cap U^C = A \cap V$.
Thus $A \cap U$ and $A \cap V$ are both open subsets of $A$ and are complements of each other, so they are clopen. SInce $A$ is connected, one of them must be empty, so either $A \cap U = A$ so $A \subseteq U$, or $A \cap V = A$ so $A \subseteq V$.
(4)
Let $\ds p \in \bigcap_{\alpha \in A} B_\alpha$
Suppose $U, V$ are disjoint open sets that disconnect $B = \ds \bigcup_{\alpha \in A} B_\alpha$. This means the sets
\[U \cap B\text{ and } V \cap B\]are nonempty and disjoint, and their union is $B$, and
\[U \cap V \cap B = \emptyset\]since $U$ and $V$ are disjoint.
Then each $B_\alpha \subseteq U$ or $B_\alpha \subseteq V$. However, $p \in B_\alpha$ for every $\alpha$, so $p \in U$ and $p \in V$. This contradicts $U$ and $V$ disconnecting $B$, so $B$ must be connected.
Path-connectedness
Let $X$ be a topological space. A path (or curve) in $X$ is a continuous map $\alpha : [0, 1] \to X$.
(Since any interval $[a, b] \subseteq \R$ is homeomorphic to $[0, 1]$, an equivalent definition of a curve is a continuous map $\alpha : [a, b] \to X$.)
We say $\alpha$ is a path between $p \in X$ and $q \in X$ if $\alpha(0) = p$ and $\alpha(1) = q$.
A topological space $X$ is path connected if there exists a path between any two points in $X$.
Path-connected spaces are connected
Let $X$ be a path connected space and suppose $U, V$ are open subsets that disconnect $X$.
Let $u \in U$ and $v \in V$, then let $\alpha$ be a path connecting $u$ and $v$.
$\alpha([0, 1]) \subseteq U \cup V = X$, and it is connected (because it is the image of $[0, 1]$ which is connected). By property (1) proved above, this means that either $\alpha([0, 1]) \subseteq U$ or $\alpha([0, 1]) \subseteq V$, which is a contradiction.
Thus $X$ is connected.
For example, $\R^n$ is connected, as given points $\mathbf x$ and $\mathbf y$ we can construct the path $\alpha(t) = t\mathbf x + (1 - t) \mathbf y$ where $t \in [0, 1]$.
$\Sp^n$ is also connected as given points $\mathbf x$ and $\mathbf y$ we can construct the path $\alpha(t) = cos(t)\mathbf x + sin(t) \mathbf y$ where $t \in [0, 2\pi]$.
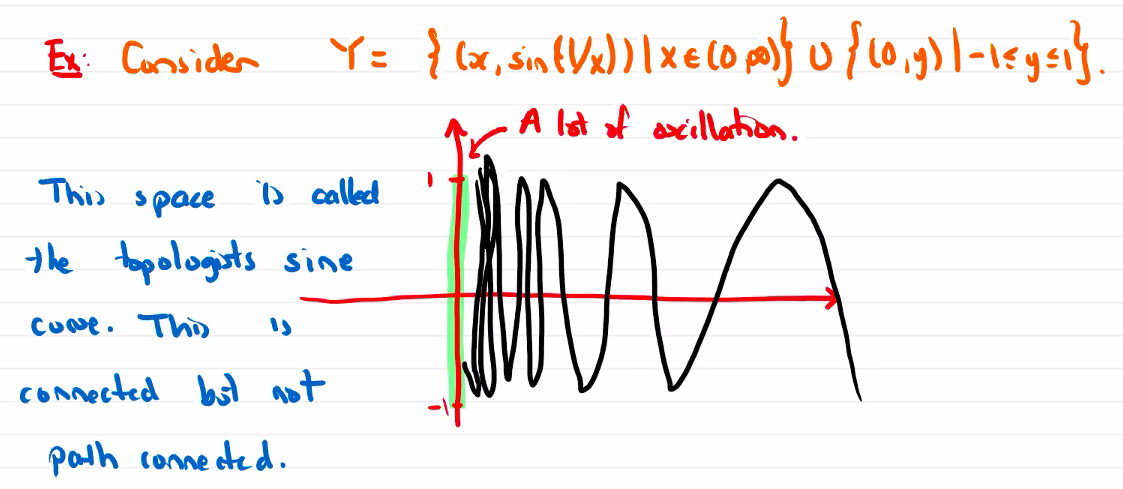
Connected does not imply path connected
Components
Path-connected components
Let $X$ be a topological space and let $x, y \in X$.
We say $x \underset{p}{\sim} y$ if there is a path connecting $x$ and $y$.
The equivalence classes defined by this relation are called path-connected components.
Connected components
Let $X$ be a topological space and let $x, y \in X$.
We say $x \underset{c}{\sim} y$ if these exists a connected set $U \subseteq X$ with $x, y \in U$.
The equivalence classes defined by this relation are called connected components.
Example: Orthogonal matrices
We define the space of orthogonal matrices
\[O(n) = \curlies{A \in GL_n(\R) : A A^T = A^T A = I}\]This space is disconnected and compact.
Disconnected:
We know that the image of a connected space under a continuous function must be continuous. Consider the determinant $det : O(n) \to \R$. This function is continuous, and its image $det(O(n)) = \curlies{-1, 1}$: suppose $A \in O(n)$, then
\[\begin{align*} A A^T &= I \\ det(A A^T) &= 1 \\ det(A) det(A^T) &= 1 \\ det(A)^2 &= 1 \\ det(A) &= \pm 1 \end{align*}\]$\curlies{-1, 1}$ is disconnected, so $O(n)$ must also be disconnected.
Note that the determinant is constant on two disjoint subsets of $O(n)$, so there are at least two connected components.
In fact, there are two components. Let $SO(n)$ be the set of matrices in $O(n)$ with determinant $1$. Note that $I \in SO(n)$.
Suppose $A \in SO(n)$, then since $A$ does not change orientation, it can be written as a composition of rotations in different planes, i.e.
\[A = \begin{bmatrix} \cos(\theta_1) & -\sin(\theta_1) \\ \sin(\theta_1) & \cos(\theta_1) \\ & & \cos(\theta_2) & -\sin(\theta_2) \\ & & \sin(\theta_2) & \cos(\theta_2) \\ & & & & \ddots \\ & & & & & 1 \end{bmatrix}\](the $1$ at the end is not necessarily there if $n$ is even)
Then we can construct a path in $SO(n)$ from $I$ to $A$ as
\[\phi(t) = \begin{bmatrix} \cos(\theta_1 t) & -\sin(\theta_1 t) \\ \sin(\theta_1 t) & \cos(\theta_1 t) \\ & & \cos(\theta_2 t) & -\sin(\theta_2 t) \\ & & \sin(\theta_2 t) & \cos(\theta_2 t) \\ & & & & \ddots \\ & & & & & 1 \end{bmatrix} \text{ where } t \in [0, 1]\]Thus, $SO(n)$ is path-connected.
$O(n) \setminus SO(n) = \curlies{-A : A \in SO(n)}$ is homeomorphic to $SO(n)$, so it is also path-connected.
$SO(n)$ and $O(n) \setminus SO(n)$ are disjoint, each is path connected, and their union is $O(n)$. Thus they are the two connected components of $O(n)$.
Compact:
$O(n) = det^{-1}(\curlies{-1, 1})$, so $O(n)$ is the preimage of a closed set under a continuous function, so it is closed.
Since each matrix in $SO(n)$ can be put in the form above, we can see that the norm of each matrix is $n$, since the norm of each column of the matrix is $1$ (because $\sin^2(x) = \cos^2(x) = 1$). The same is true for the rest of $O(n)$, since if $A \in O(n) \setminus SO(n)$ then $-A \in SO(n)$. Thus, $O(n)$ is bounded.
Since $SO(n)$ is a closed and bounded subspace of $\R^{n^2}$, by the Heine-Borel theorem it is compact.